
 Overview of the Intelligent Double-Girder Bridge Crane
Overview of the Intelligent Double-Girder Bridge Crane
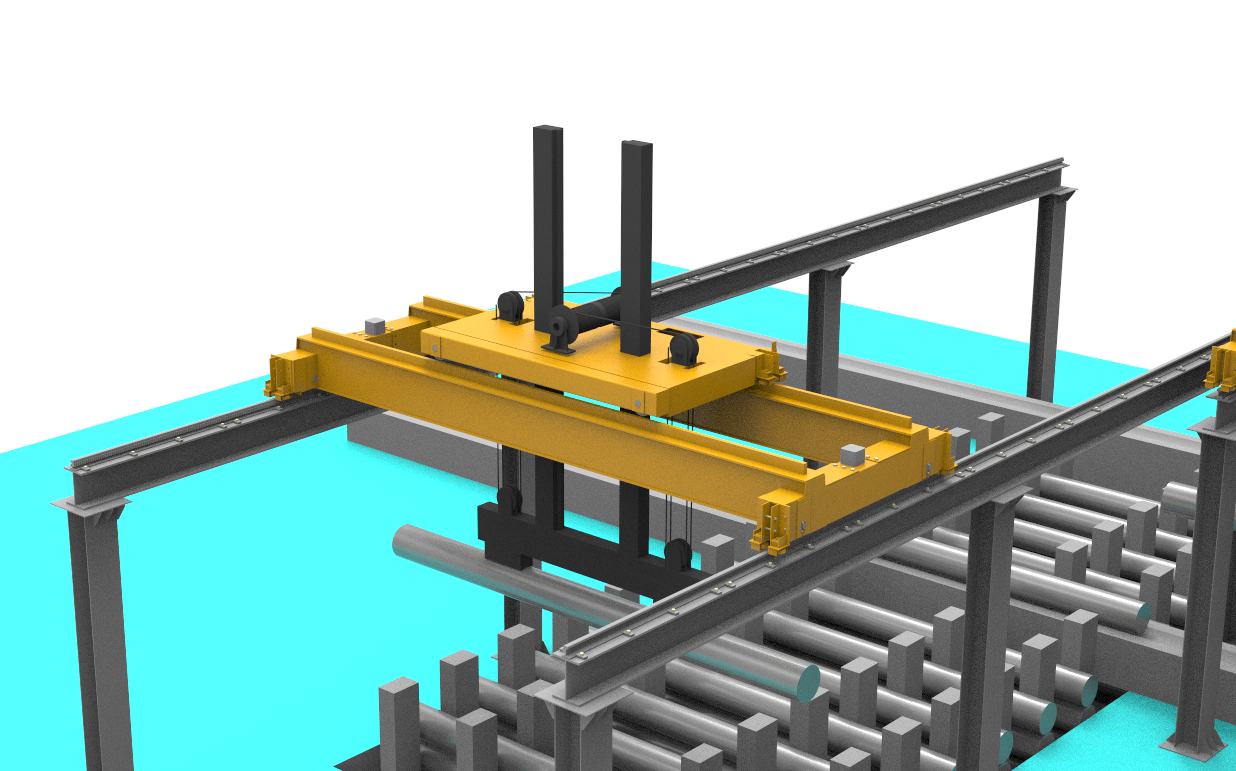
The unmanned bar material manipulator (intelligent double-girder bridge crane) executes automated handling tasks through a sophisticated control program. The positioning system employs an X, Y, and Z modular design to accurately determine the location of the bars.
Following this, the host computer transmits coordinate instructions for the bars to the bridge crane, which utilizes a comprehensive path-planning algorithm to achieve precise control over movement and distance. Furthermore, each grasping action is validated by sensor feedback before proceeding to the next step, ensuring fully autonomous and unmanned operation throughout the process.
Technical parameters
|
1 |
Rated lifting capacity |
t |
6.5t(without spreader) |
|
2 |
Lifting height |
m |
4 |
|
3 |
Span |
m |
7.15 |
|
4 |
Working level |
A7 |
|
|
5 |
Lifting speed (Z-axis) |
m/min |
0.8 ~8 |
|
6 |
Trolley travelling speed (Y axis) |
m/min |
3~30 |
|
7 |
Crane travelling speed (X axis) |
m/min |
4.5~45 |
|
8 |
Mode of operation |
Program control |
|
|
9 |
Power supply |
400V 50HZ 3P |
|
|
10 |
Crane rail |
P30+Rack and pinion |
|
|
11 |
Moving stroke(X-axis) |
m |
10 |
|
12 |
Positioning accuracy |
mm |
±5 |
|
13 |
Ambient temperature |
℃ |
-30~40 |

Operational Workflow of Bridge Crane
The operational procedure of the overhead crane is outlined below (X-axis:crane travel; Y-axis: trolley travel; Z-axis: trolley lifting operation):
- Upon receiving the grasping instruction transmitted by the host computer, the crane accurately navigates to the designated position along the X-axis and Y-axis.
- The lifting mechanism descends while utilizing an encoder to measure the distance for pre-deceleration, with a detection switch incorporated to prevent potential collisions.
- The electromagnetic hoist executes magnetization to securely adsorb the bar stock.
- The lifting mechanism raises the bar stock, transports it to the specified location, and subsequently lowers the lifting mechanism again.
- The electromagnetic hoist performs demagnetization, the lifting mechanism ascends, and the crane returns to its initial position along the X-axis and Y-axis.
Calculation of handling process time
|
1 |
Bar Manipulator descends to the designated position of the bar stock. |
14s |
Lifting height: 1.5m |
|
2 |
Induce magnetization and securely grasp |
5s |
|
|
3 |
Bar lifting |
14s |
Lifting height: 1.5m |
|
4 |
Translation along the X-axis |
24s |
10m(With consideration of start-up and braking processes) |
|
5 |
Z-axis downward movement |
32s |
4m |
|
6 |
Magnetic flux reduction |
5s |
|
|
7 |
Vertical upward movement of the Z-axis |
32s |
|
|
8 |
Revert to the original position. |
24s |
(With consideration of start-up and braking processes) |
|
9 |
Total time elapsed |
150s |